1. How much do military drones cost?
(1). Micro/small tactical UAVs are about $35,000–$50,000/unit
(2). Medium-sized reconnaissance/reconnaissance integrated UAV is about $1–$2 million/unit (export price)
(3). High-end strategic UAVs are about $20–$30 million/unit
(4). Stealth/high-performance drones: about $50–$100 million/unit
2. How high can military drones fly?
Flight altitude
(1).Micro UAV: 50~1,000 meters
(2).Chada all-in-one machine: 3,000~9,000 meters
(3). Strategic UAV: 15,000~20,000 meters
(4). Stealth drone: 10,000~16,000 meters
3.What is a Future Soldier program?
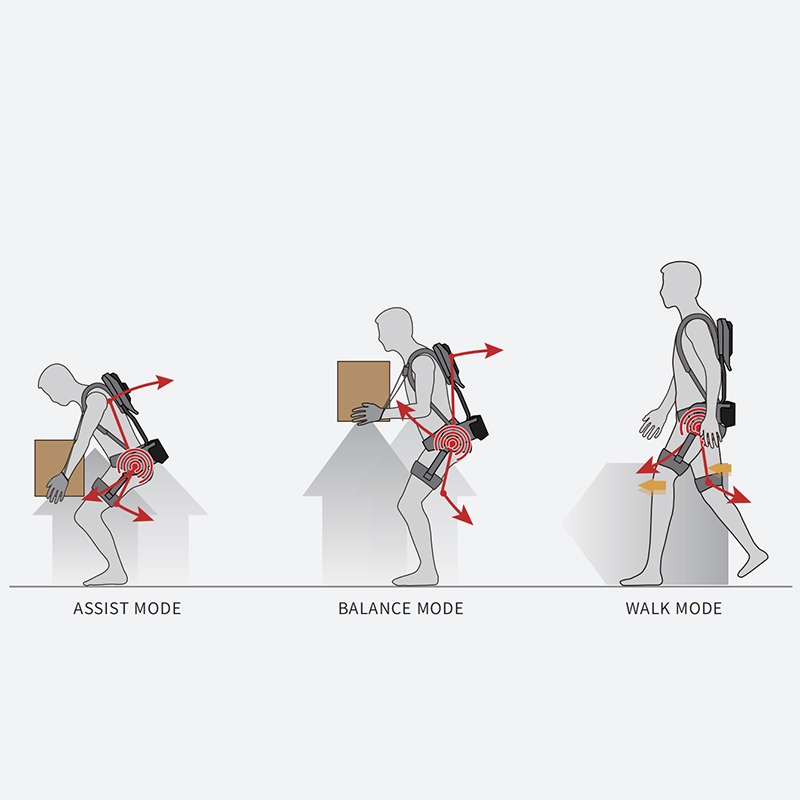
The Future Warrior Program is a military science and technology project implemented by many countries to promote the modernization of individual combat systems, aiming to create highly information-based and intelligent super soldiers through artificial intelligence (AI), exoskeletons, augmented reality (AR), networked equipment and other technologies. Similar programs vary in name and focus from country to country, but the core goal is the same: to improve soldiers' survivability, combat effectiveness, and battlefield awareness.
4.What is the Future Soldier concept?
"Soldier as platform": Treat individual soldiers as a highly networked and intelligent combat node, and share real-time data with UAVs, combat vehicles, and command headquarters.
"Human-machine collaboration": Soldiers are deeply integrated with AI, robots, exoskeletons and other equipment to form "over-the-horizon" combat capabilities.
"All-dimensional superiority": Covering reconnaissance, firepower, protection, communications, and logistics, all aspects of scientific and technological crushing.
5.Which robot is used in military?
The main points are as follows:
(1). Ground combat robots
(2). Aerial Robotics (UAV/UAV)
(3).Underwater Robot (UUV)
(4).Logistics and support robots
(6).Special task robots
6. What is the most used military robot?
Among the militaries of various countries, the most widely used and deployed robots are small unmanned ground vehicles (UGVs) and micro unmanned aerial vehicles (UAVs), especially EOD/reconnaissance robots and low-cost reconnaissance drones.
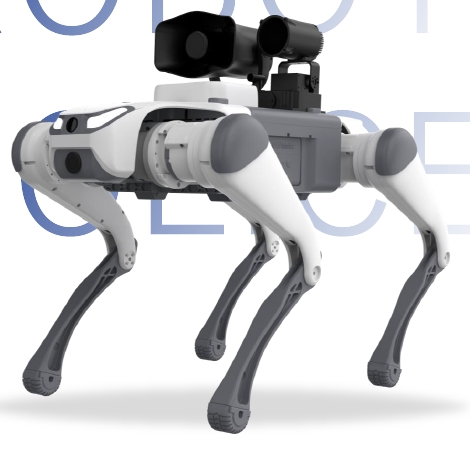
7. How much does the military robot dog cost?
High-end combat type: $100,000~$300,000
Scouting/Transportation Type: $20,000~$100,000
8. Are the robot dogs being armed with guns?
Typical prices for current military robot dogs:
High-end combat type: $100,000~$300,000
Scouting/Transportation Type: $20,000~$100,000